STAGE2 <<
Previous Next >> W9
W6-W8
組別:stage2-bg10
小組網頁 stage2-bg10
小組倉儲 stage2-bg10repository
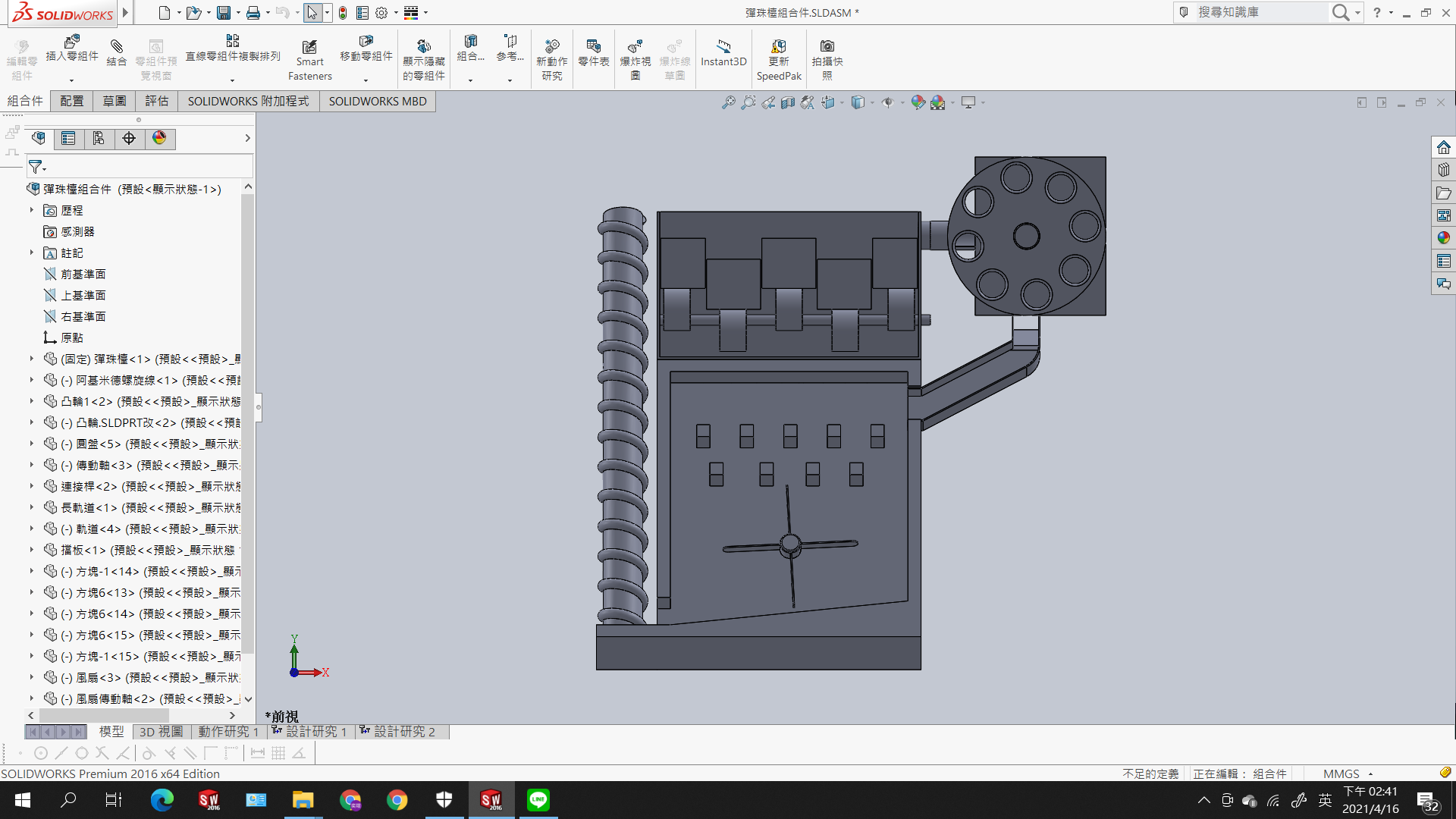
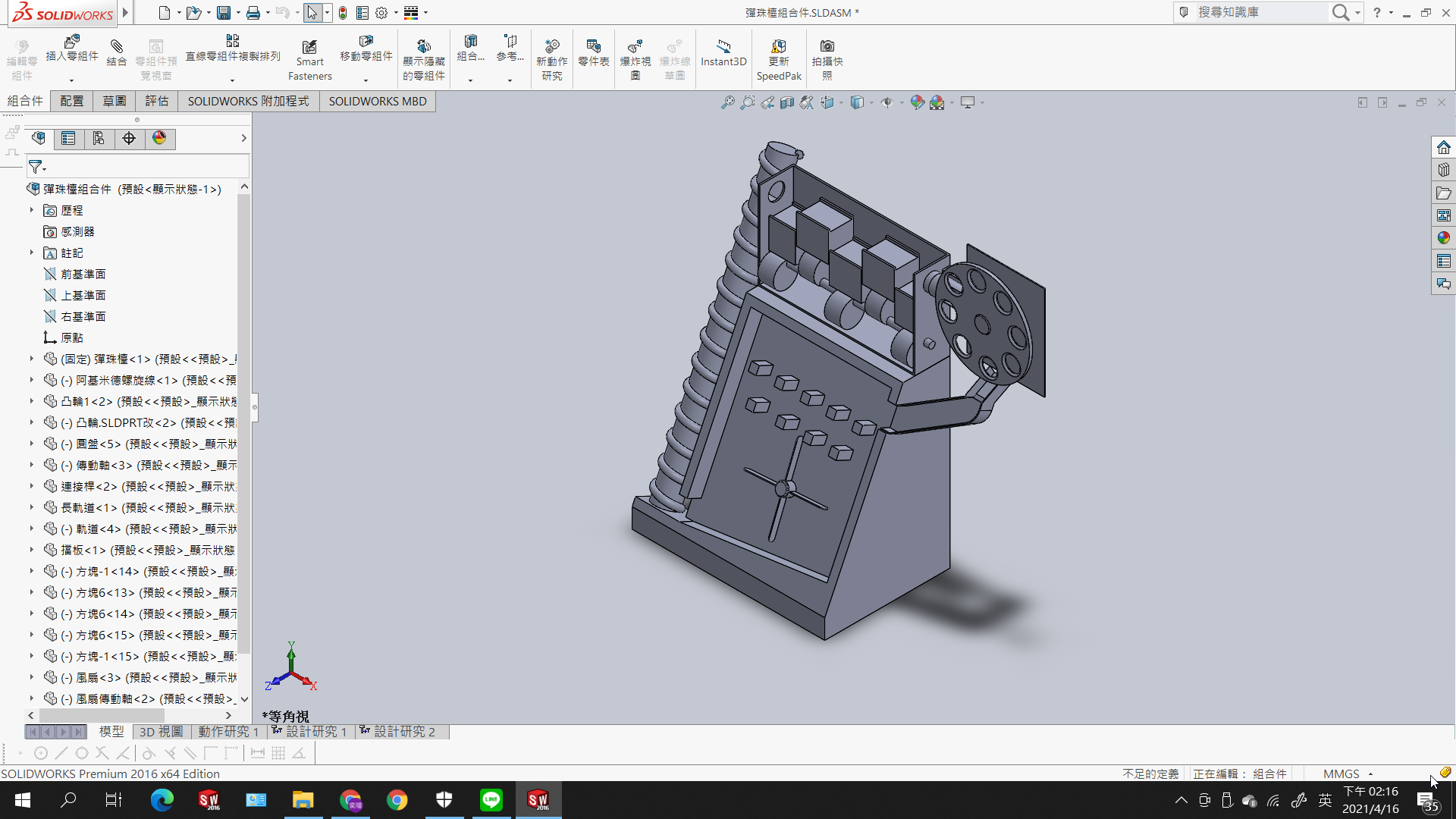
專題題目:彈珠軌道
研發動機:利用我們學過的原理製造出一台可以自行運作的機台出來玩。
運用原理:1.運用阿基米得原理,讓彈珠可以沿著一個平面向上移動
2.運用凸輪原理,使其做一個上下的使其做一個上下的反覆運動,讓彈珠可以像爬階梯一樣。
3.用圓盤的轉動,將球運送至彈珠台(控制圓盤的轉數去查看彈珠的運動軌跡)
初版本-
STAGE2 <<
Previous Next >> W9