STAGE1 <<
Previous Next >> W4
W2-W3
小組網頁 stage1-bg12
小組倉儲 stage1-bg12repository
專題題目:鋁罐壓扁機
動機:在系館7樓垃圾桶有時候會看到沒壓扁的鋁罐很佔垃圾桶的空間,所以我們設計此機構希望可以減少此類麻煩
運用原理:直線運動機構分為精確直線運動機構和近似直線運動機構兩類。其中精確直線運動機構的設計思想主要有兩種:一種是利用幾何中的反演變換,把連杆末端的圓弧路徑反演為直線,用機械反演器可以完成這一功能;另一種則是通過兩個不平行的連杆結構,把路徑限制在兩個平面的交線。近似直線運動機構則是通過多個杆件實現自由度為1的連接,調整杆件的長度使得一點的運動軌跡中包含一段近似直的線段。
參考來源:
初版本-
設計機構:
零件圖
組合圖
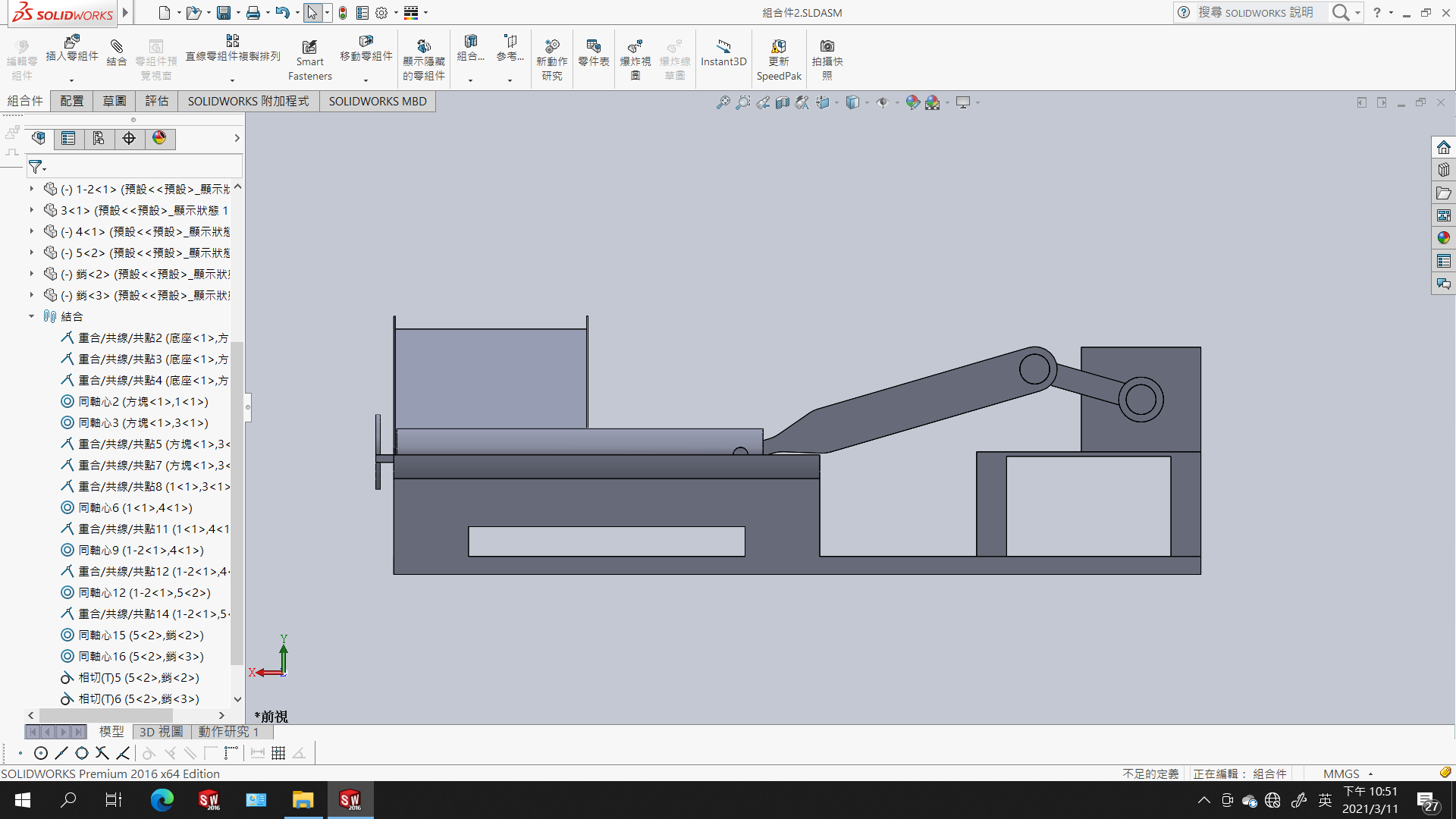
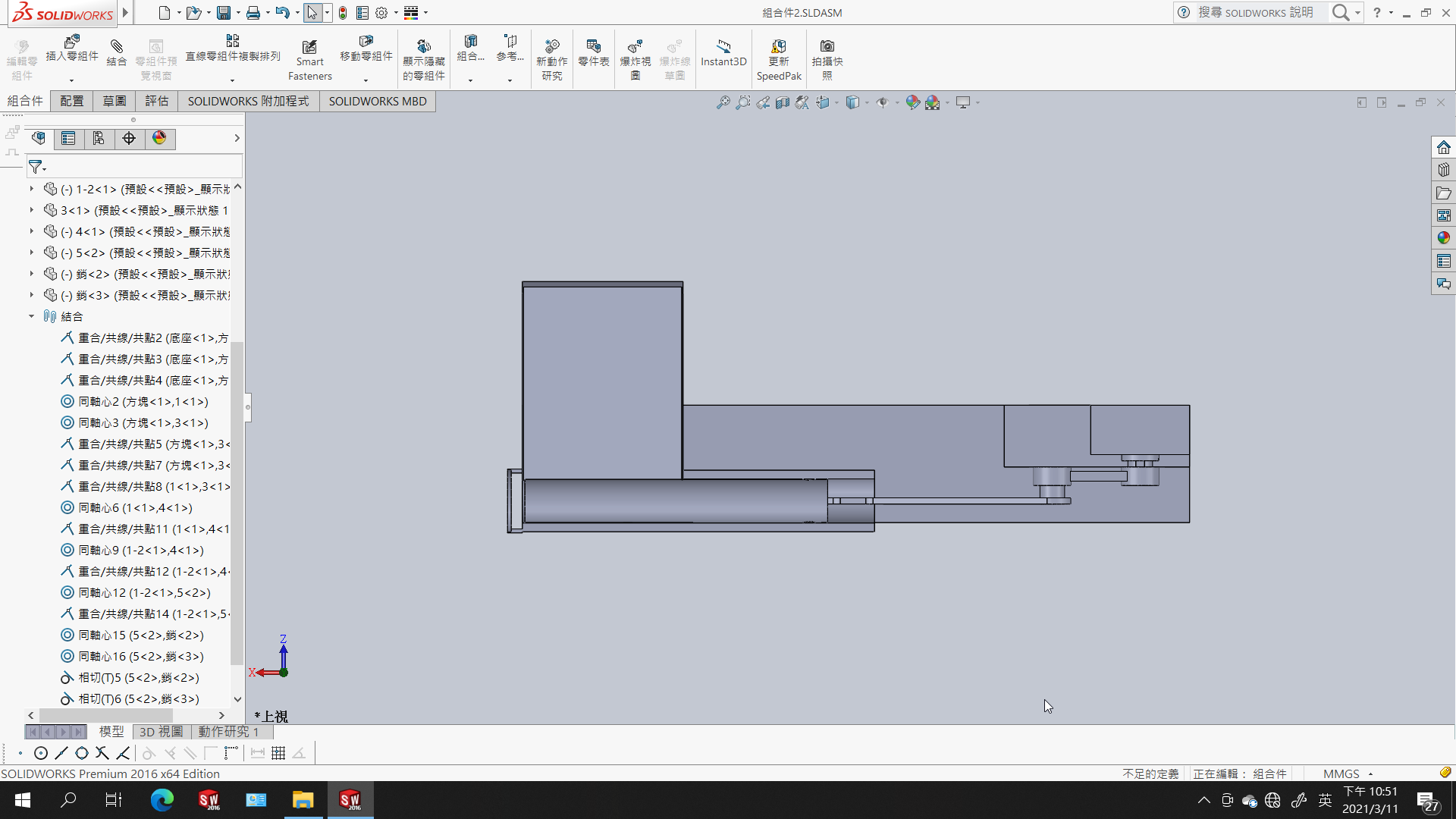
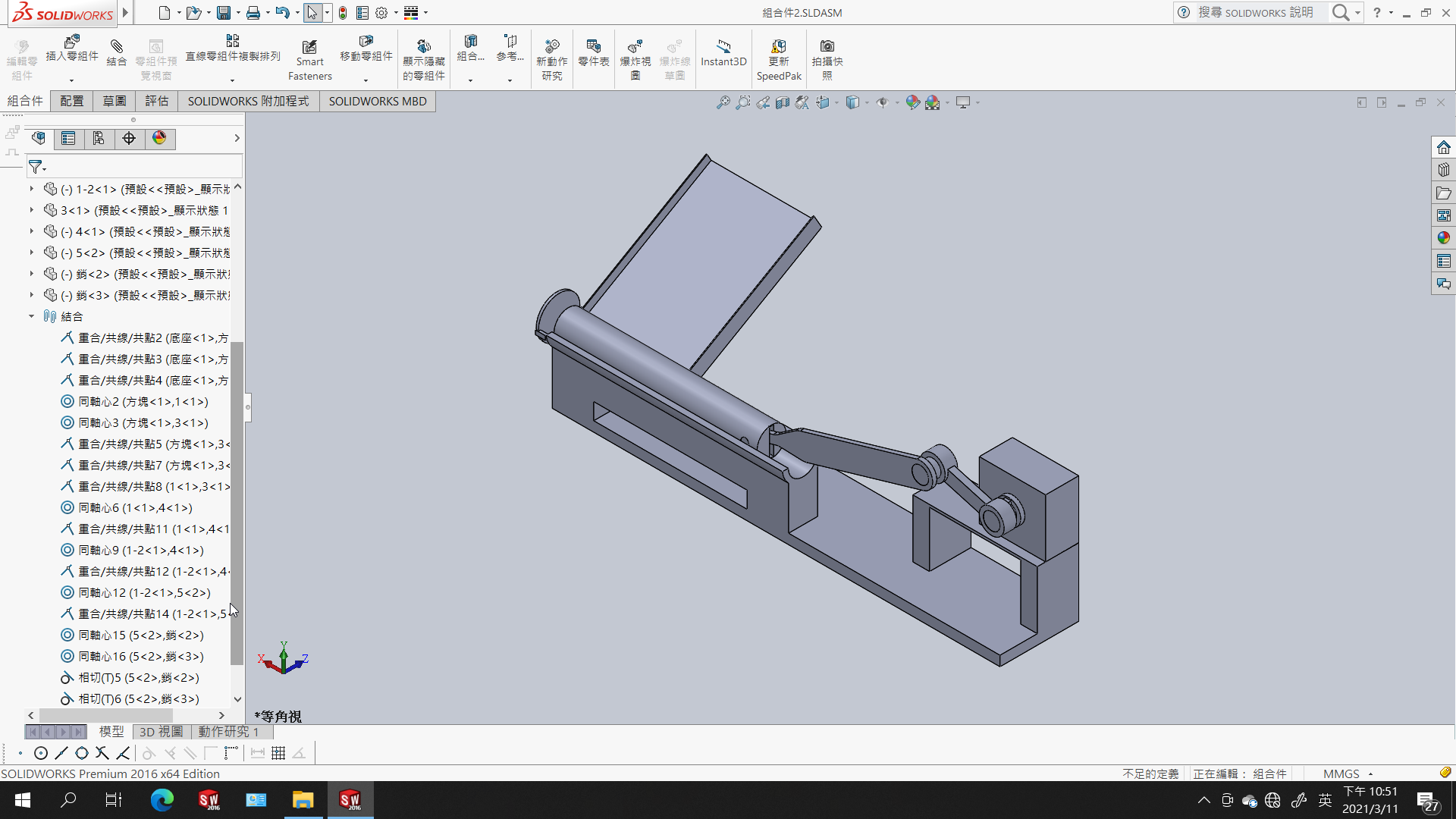
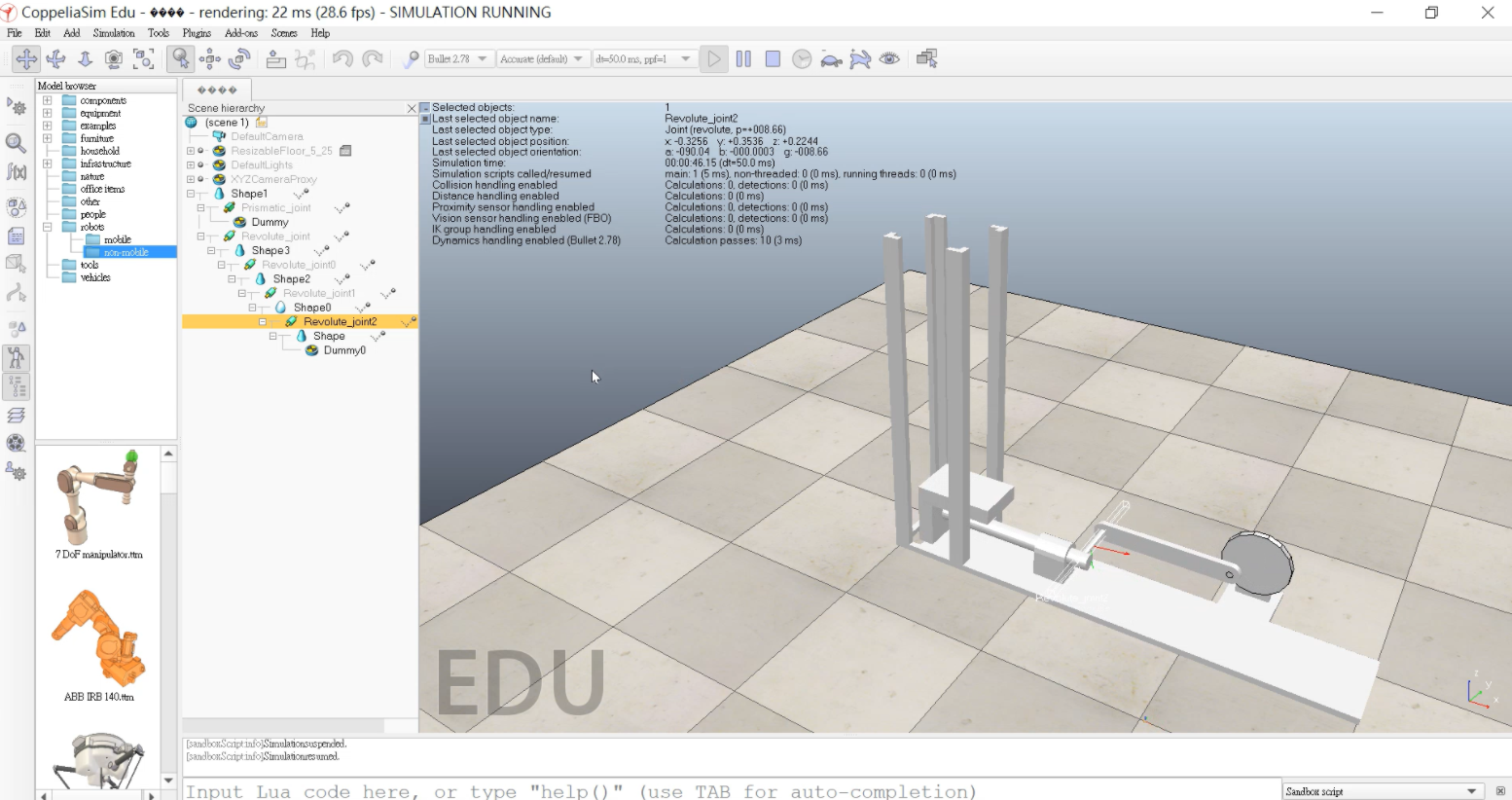
利用此版本了解這個原理,但是模擬出來考慮到鋁罐從斜面上滾落時,會直接摔出,所以繼續討論改變的方法。
最終版本由組員畫出
STAGE1 <<
Previous Next >> W4